Prace nad EPS
Prace nad EPS rozpoczęły się w połowie 2013 roku. Od tego momentu pracowały nad nim trzy osoby, z czego jedna osoba była odpowiedzialna za projekt hardware’u, a pozostałe dwie za software oraz HAL (HAL – ang. hardware abstraction layer). Ostateczna wersja hardware’u powstała w połowie 2017 roku, a ostateczna wersja software’u pod koniec 2017 roku.
Model DM
Najważniejszą częścią EPS jest moduł MPPT. Model DM (DM – ang. demonstration model) modułu MPPT powstał pod koniec 2013 roku aby zweryfikować założenia funkcjonalności tego modułu. Model ten potwierdził, że założony sposób sterowania przetwornicą DCDC jest dobry ale pokazał również, że projektowanie tego typu układów wymaga większej wiedzy związanej z EMC (EMC – ang. electromagnetic compatibility). Opis modelu DM oraz wyniki eksperymentów można znaleźć w dokumentacji fazy A.
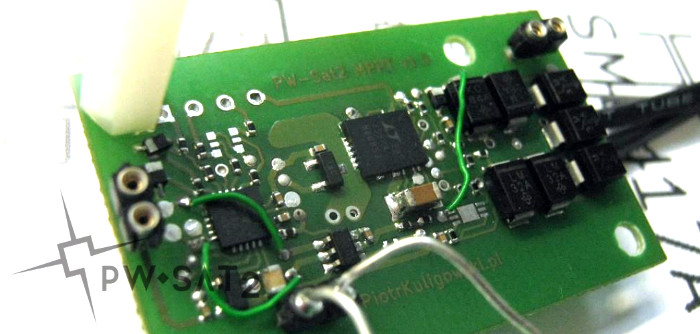
Płytka modelu DM
Model EM1
Kolejnym modelem EPS był model EM1 (EM – ang. engineering model 1), który powstał pod koniec 2016 roku. Składał się z mniejszych modułów, które reprezentowały poszczególne części funkcjonalne docelowego EPS, bez uwzględniania redundancji. Do czasu powstania tego modelu podsystem EPS został całkowicie przedefiniowany oraz uproszczony.
W skład modelu EM1 wchodziły: moduł MPPT sterowany za pomocą mikrokontrolera AVR, prototypowa ładowarka akumulatorów li-ion, pakiet akumulatorów li-ion, układ do realizacji funkcjonalności RBL/kill-switch, przetwornice DCDC 3.3V oraz 5V, zasilające podsystemy.
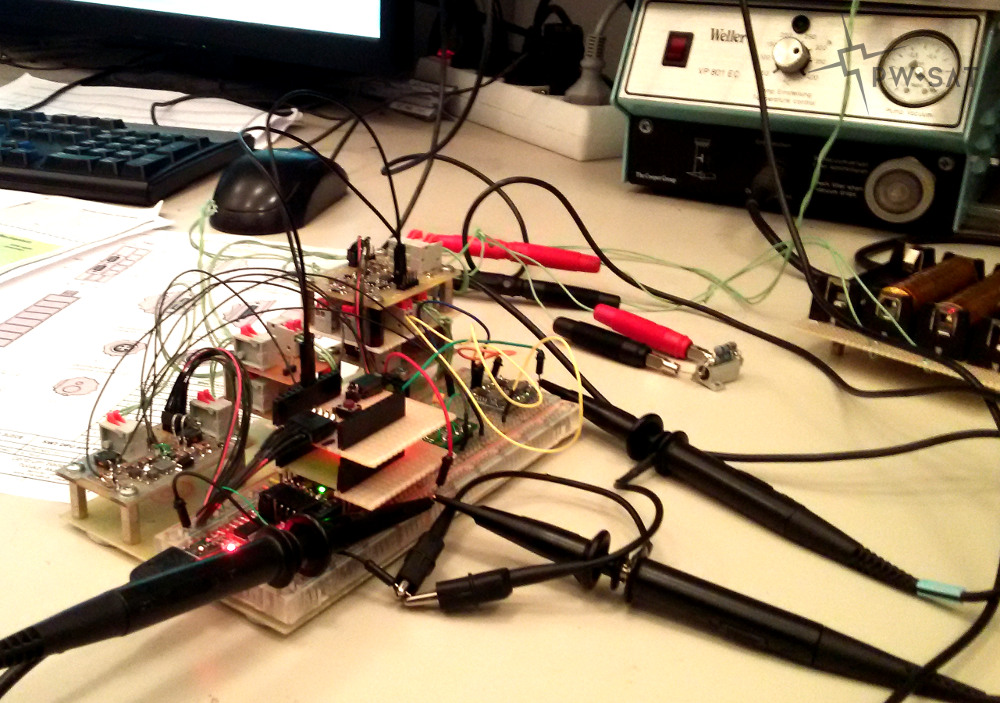
Model EM1 podczas testów
Za pomocą modelu EM1 zweryfikowano ogólną architekturę EPS. Szczegółowy opis modelu EM1 można znaleźć w dokumentacji fazy C.
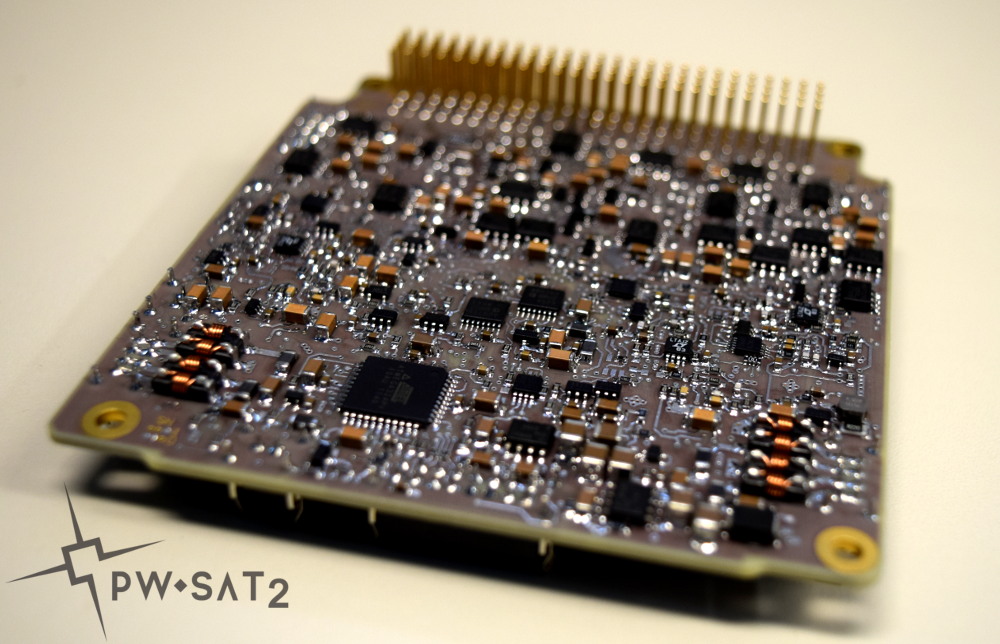
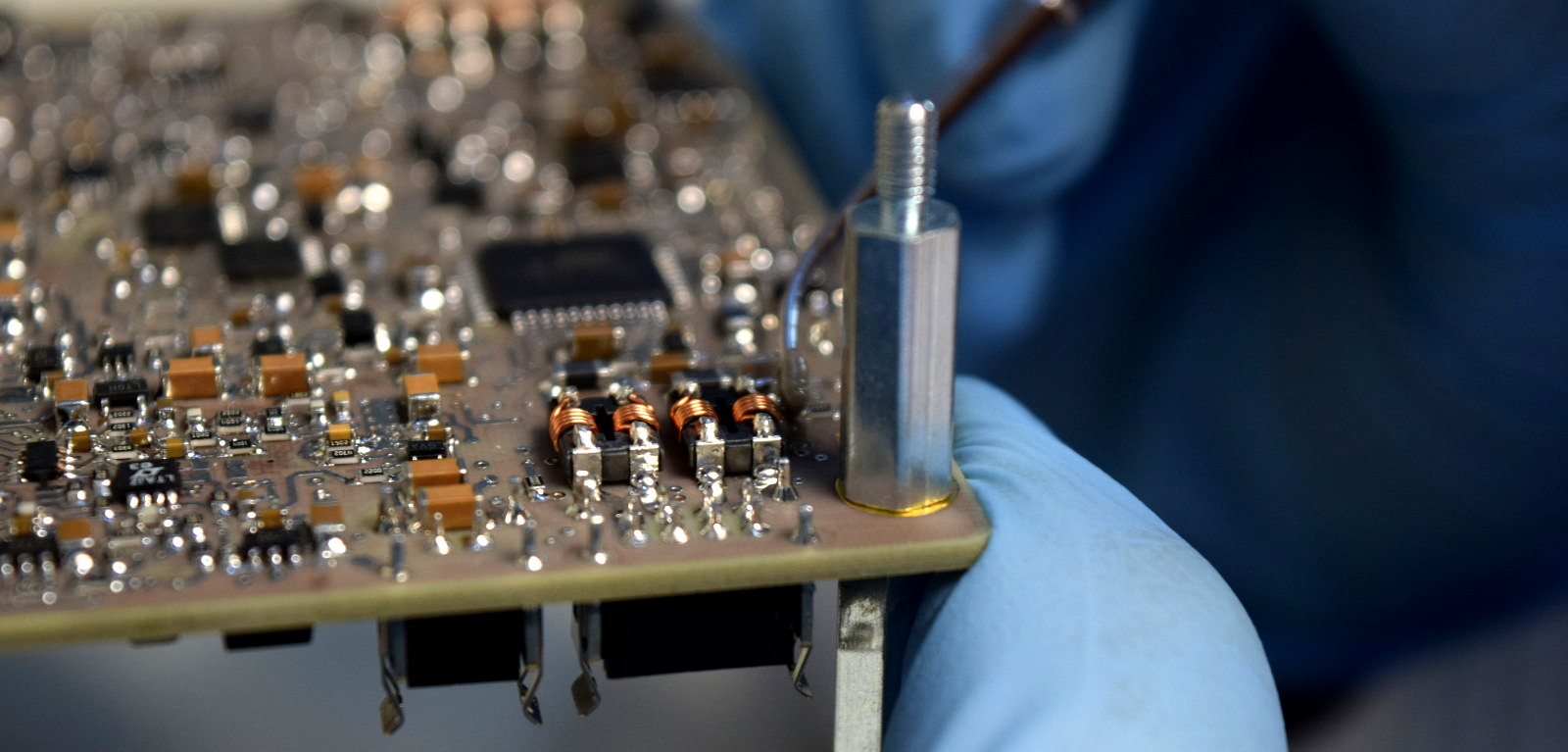
Model EM2
Model EM2 EPS powstał na początku 2017 roku. Posiadał pełną funkcjonalność modelu PFM (PFM – ang. proto-flight model). Również płytka drukowana została zaprojektowana w taki sposób, aby mechanicznie odpowiadała modelowi FM.