Odłączenie satelity od wyrzutnika na orbicie może spowodować niekontrolowane obracanie się. Zbyt duża prędkość obrotowa doprowadzi do problemów z komunikacją oraz z ładowaniem akumulatorów z paneli słonecznych. Dlatego głównym zadaniem systemu kontroli i zmiany orientacji (Attitude Determination and Control System – ADCS) w PW-Sat2 jest zmniejszenie prędkości obrotowej satelity do akceptowalnych wartości.

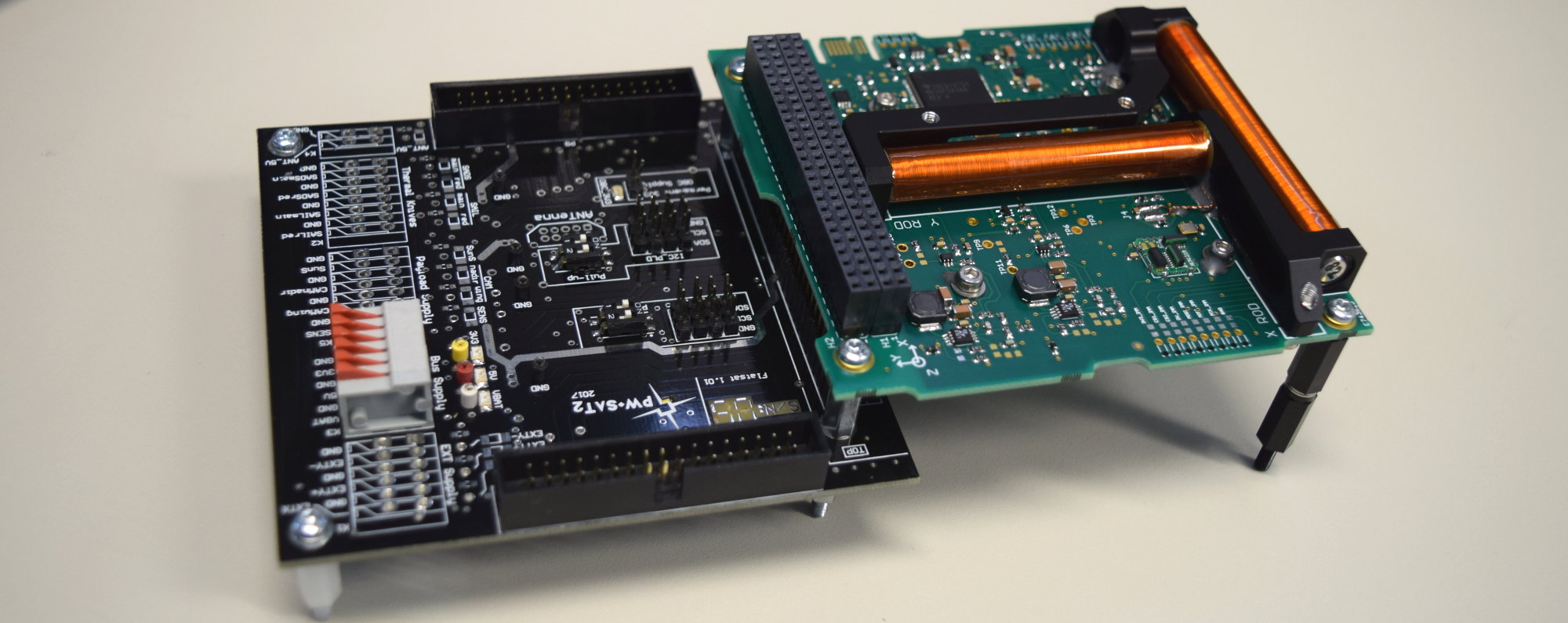
Płytka lotna systemu ADCS PW-Sat2
ADCS składa się z dwóch cewek z rdzeniem ferrytowym oraz jednej bez rdzenia. Zmiana orientacji satelity polega na przepuszczaniu prądu przez cewki.